
Manufacturing of microsystems based on complex three-dimensional microstructures requires critical steps such as mass calibrations and integration process. However, such steps involve several manipulation steps which are not well controlled thus the fragile 3D microstructures could be damaged or destroyed. In this work, we have demonstrated an AFM based direct mass measurement and manufacturing of 3D helical microswimmer. The proposed method shows to be rapid, repeatable and minimally-destructive thanks to the precise force control and manipulation by AFM. The proposed micromanipulation steps consist of the pick-measure-integrate manipulation steps using van der Waals force-based attachment and the mass measurement by resonant frequency shift. For the testing structures, we fabricated the 6 different types of 3D helical microswimmers vertically fabricated on the conical shape microneedle supports for uniform surface metallization and facile detachment. With the mass measurement sensitivity of 25 Hz/pg and the direct integration to microfluidics, we successfully demonstrated the 3D propulsion and non-contact micromanipulation by 3D helical microswimmer in microfluidics. This work is the result of the multidisciplinary and international collaboration of two different laboratories, including the LIMMS-CNRS laboratory, Institute of Industrial Science, The University of Tokyo and the C2N-CNRS, Université Paris-Saclay.
Références
G. Hwang1, C. David1, A. Paris1, D. Decanini1, A. Mizushima2 and Y. Mita2
IEEE Trans. Semiconductor Manufacturing, PP(99):1-1, mai 2021
DOI: 10.1109/TSM.2021.3082902
Affiliations
1 Center for Nanosciences and Nanotechnologies (C2N), CNRS - University Paris-Saclay, Palaiseau 91120, France
2 LIMMS-CNRS, Institute of Industrial Science, The University of Tokyo
Contact : Gilgueng Hwang, Equipe BIOSYS, Dpt Microsystems and Nanobiofluidics (LIMMS, The University of Tokyo)
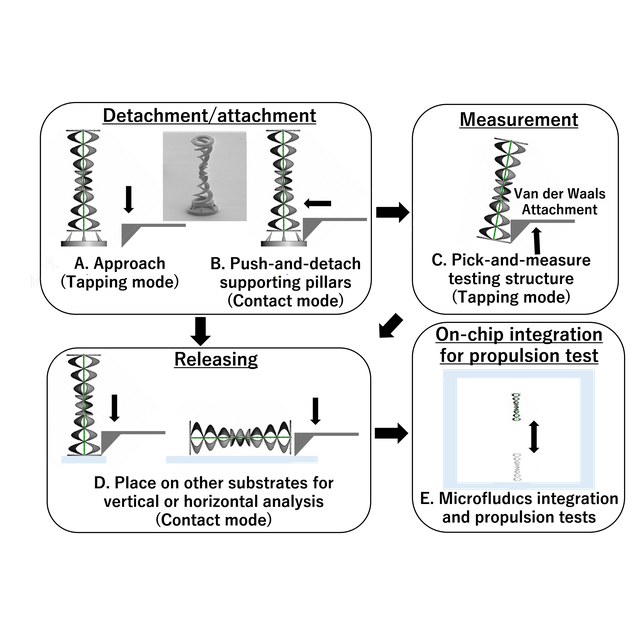
Illustration : Manufacturing process of 3D helical microswimmers by AFM micromanipulation for the microfluidic integrations and propulsion tests

